软体微机器人因其形态可变性、物理适应性、交互友好性而得到广泛关注,在癌症靶向治疗等个性化先端医疗领域展现出巨大潜力。目前,微机器人通过搭载特定物质并在光、电、磁等物理场刺激下运动、形变可以完成特定任务。光和磁场都可以作为非接触的远程控制形式,用于控制某些运动行为,在微机器人和生物医疗领域具有广阔的应用前景。
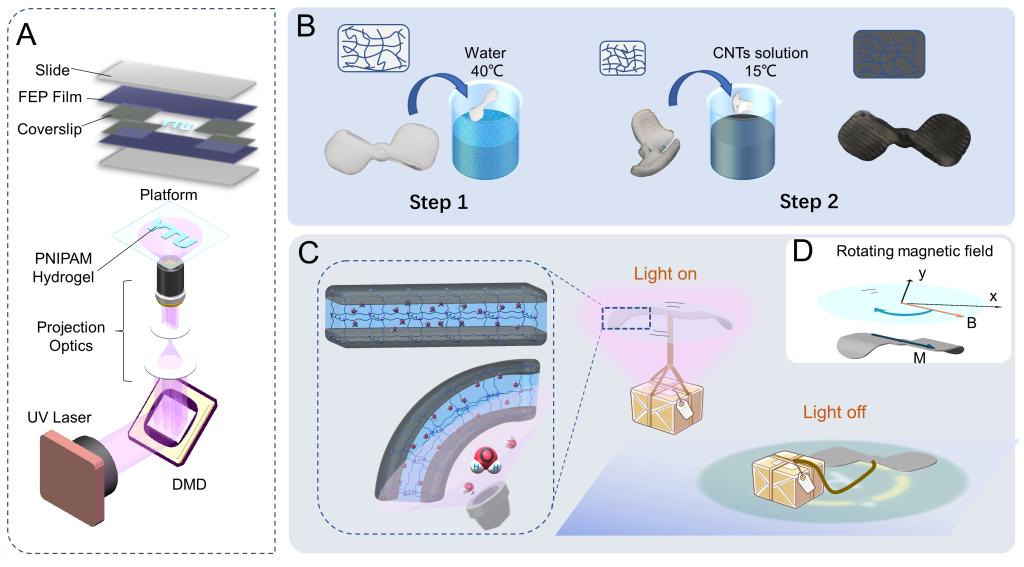
图1光磁耦合驱动的可控变距微螺旋桨机器人示意图
近日,我院机电汽车工程学院杨文广带领科研团队在跨学科一区TOP期刊SENSORS AND ACTUATORS B-CHEMICAL上发表题为《Bio-inspired propeller robot with controllable pitch driven by magnetic and optical coupling field》的学术论文。该工作受仿生思想的启发,将直升机现有的驱动形式应用在微型机器人中,制造了一种光可控变距微螺旋桨机器人。在合成的光响应复合水凝胶内部封装磁性材料,并通过磁场发生器为微螺旋机器人提供旋转动力。通过氙灯光源的照射来调节桨距,使螺旋桨变换不同的运动形式。可控变距螺旋桨机器人为微型水下航行器和微飞行器的设计提供了一种新颖的思路。
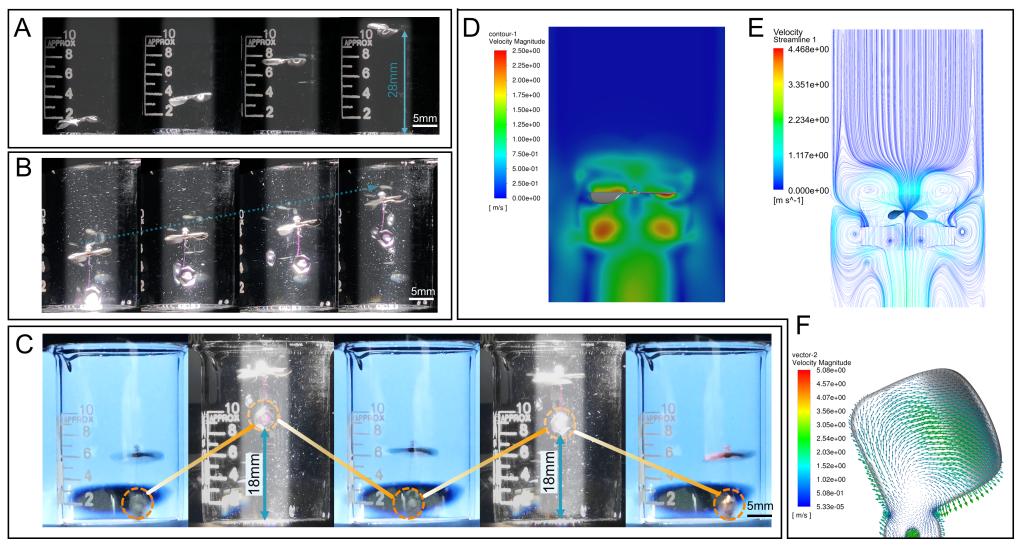
图2微螺旋桨的光可控飞行和有限元分析
杨文广副教授为该论文的通讯作者。该科研团队始终致力于小尺寸机器人的研究,针对毫米级、微米级机器人开展了一系列研究,在磁驱动毫米机器人、光驱动毫米机器人、热驱动毫米机器人、混合驱动机器人等方面取得了一系列研究成果。此外,团队论文《Recent advance in surface modification for regulating cell adhesion and behaviors》于2023年1月入选ESI高被引论文,体现了国内外学者对我院教师科研成果的广泛关注和认可。
相关工作得到了国家自然科学基金、山东省自然科学基金、辽宁省科技厅机器人学国家重点实验室联合基金、hy590海洋之神平台研究生科研创新基金的资助。
原文链接:https://doi.org/10.1016/j.snb.2023.133509